Who says you can’t teach an old dog new tricks? Well, in this case, it’s not a dog, but a quadrupedal robot learning to do more than just fetch. Thanks to a groundbreaking collaboration between Carnegie Mellon University, Google DeepMind, and Bosch, our four-legged friends are stepping up their game with a system called Human2LocoMan. This isn’t just a walk in the park; it’s a leap into the future of robotics!
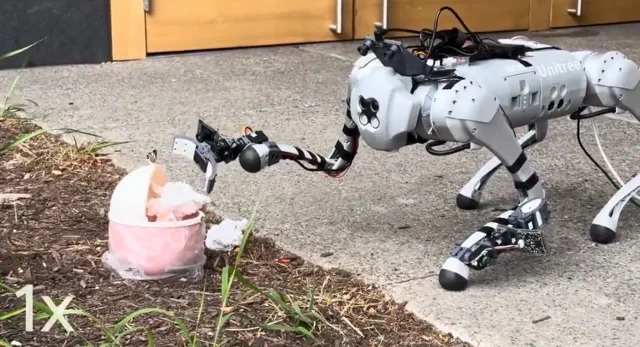
The secret sauce? Human data. By pretraining robot policies on human motion before fine-tuning on real hardware, these clever researchers have created a quadruped that’s not just fast and agile, but can also manipulate objects with finesse. Picture a robot dog that can not only chase a ball but pick it up, organise its toys, and maybe even do a bit of light housekeeping. The image shows one of these mechanical marvels reaching out with its arm to interact with an object on the ground, demonstrating its newfound dexterity.
This isn’t just a party trick; it’s a significant leap forward in robotics. The Human2LocoMan system, powered by a Modularised Cross-Embodiment Transformer (MXT), learns from both human and robot demonstrations. The result? A 50% reduction in required robot data and an impressive 80% improvement in success rates when tackling unfamiliar environments. It’s like sending your robot to a crash course in “How to Be More Human” and watching it graduate with honours. Who knows, with skills like these, we might soon see quadrupeds taking on jobs we never thought possible. Robo-baristas, anyone?