In a move that has proprietary hardware engineers clutching their non-disclosure agreements like holy relics, Roboparty has just blown the doors off the industry. The firm has released the full-stack source code and hardware blueprints for its Roboto_Original bipedal robot, a gesture of radical transparency aimed squarely at the robotics world’s “secret sauce” obsession. The company reckons this open-source gamble will slash development costs for fledgling teams by a staggering 80%.
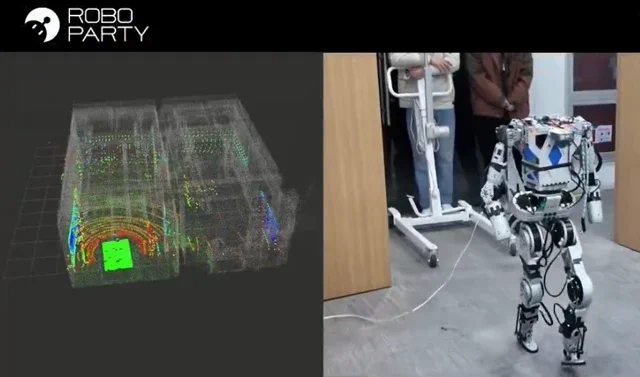
This isn’t just a handful of dusty CAD files; Roboparty has effectively lifted the bonnet and invited the world to poke around. The release includes exhaustive structural drawings, complete electronic bills of materials (EBOMs), a full supplier list, and the firm’s own AMP motion control algorithms. The bot itself is a serious bit of kit: standing 1.2m (around 4ft) tall and weighing 30kg, it can hit a respectable running speed of 3m/s (roughly 6.7mph).
Built with an automotive-grade chassis and modular joints, it’s proof that open-source hardware can go toe-to-toe with the big-budget incumbents. For the developers, it even supports the SMPL-X model, allowing it to leverage human motion capture data directly—a massive shortcut for anyone trying to streamline gait training without starting from scratch.
Why does this matter?
By handing over the keys to a high-performance bipedal platform, Roboparty is tackling the tedious and prohibitively expensive problem of “reinventing the wheel.” For years, the robotics sector has been a fragmented landscape where countless teams have spent millions to solve the exact same basic locomotion and hardware hurdles in total isolation.
This initiative provides a shared infrastructure, allowing researchers and startups to bypass the foundational grunt work. Instead of producing another “look-at-me” stunt video of a robot doing a backflip, they can focus on creating actual, real-world utility. If this takes off, it could foster a collaborative ecosystem that accelerates the entire field of embodied intelligence.
For those ready to fork the future of robotics, the complete project is available on GitHub with accompanying documentation.












