Adding a third robot to your fleet shouldn’t be the catalyst for a total system meltdown, yet for an estimated 90% of robotics teams, that is the cold, hard reality. The sheer headache of multi-robot coordination—usually reliant on clunky centralised controllers and high-bandwidth communication—has long been the industry’s most stubborn bottleneck. However, researchers at Oregon State University have just unveiled a blueprint for a future where robot squads coordinate with the silent, instinctive intelligence of an ant colony.
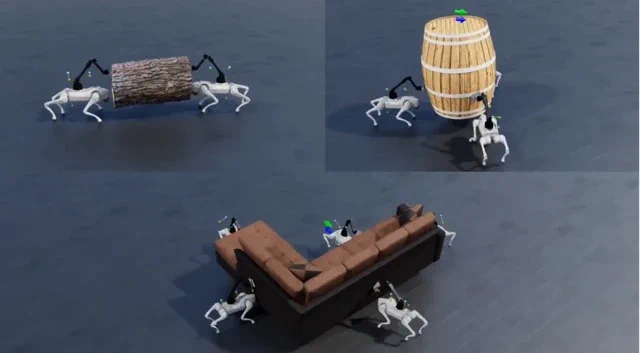
Their latest paper, decPLM (Decentralized Pinch-Lift-Move), has been accepted for the IEEE International Conference on Robotics and Automation (ICRA) 2026—essentially the robotics world’s equivalent of a headline slot at Glastonbury. The system enables a team of quadruped-arm robots to cooperatively hoist and transport awkward, “ungraspable” objects like logs, barrels, and even a sofa, all without exchanging a single bit of data. There is no master node, no dodgy Wi-Fi connection, and no frantic mid-air negotiation of joint-level commands. Instead, coordination emerges purely from the robots feeling the physical forces exerted on the object they’re carrying, using nothing but their own internal sensors—a concept known as proprioception.
The secret sauce is a shared policy trained via a clever “Constellation Reward” system, which nudges the robots to behave as if they are rigidly fused to the payload. This decentralised approach is staggeringly effective and, crucially, scalable. While the policy was trained using just two robots in a simulation, it generalizes to teams of up to ten without any extra homework. This neatly sidesteps the networking nightmares that usually plague multi-agent systems, where adding more “brains” typically leads to crippling latency and complexity.
Why does this matter?
This research flips the “more hands make light work” proverb into a technical reality, debunking the common assumption that more robots equals more problems. With decPLM, a larger fleet actually results in fewer mistakes. The team discovered that as the squad grew from two to ten robots, the tracking error for the payload plummeted by a massive 80%. The redundancy of a larger team naturally irons out individual wobbles, resulting in a smoother, more precise operation.
By ditching the communication crutch, Oregon State has built a system that is inherently more robust, scalable, and adaptable. It points towards a future where deploying a swarm of logistics robots is as straightforward as adding another unit to the pack, without needing to re-architect the entire network. As the researchers pointedly noted, this work confirms that the real bottleneck in modern robotics isn’t the hardware anymore—it’s the ML infrastructure.