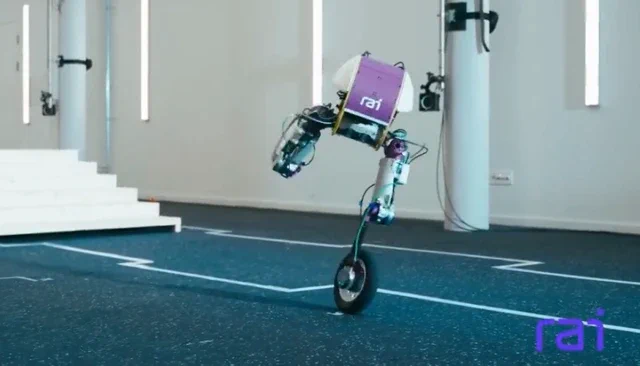
Just as bipedal robots were finally finding their feet, the Robotics & AI Institute (RAI Institute) has decided to swap them for wheels. The research outfit, headed by Boston Dynamics founder Marc Raibert, has pulled the curtains back on its latest prototype: Roadrunner. This featherweight 15kg (33 lb) bipedal bot ditches traditional feet for a pair of wheels, proving that sometimes, it’s simply better to roll with it. The machine is a master of versatile locomotion, capable of switching between a side-by-side driving stance, a nimble inline “skating” configuration, and even taking a few steps to navigate tricky obstacles.
The robot’s symmetrical legs, which can articulate at the knee to point either forward or backward, give it a remarkably flexible posture. However, the real magic lies under the bonnet—or rather, in the brain. The RAI Institute revealed that a single, unified control policy was trained to manage all of Roadrunner’s complex acrobatics. This allowed several sophisticated behaviours, such as standing up from a prone position or balancing precariously on a single wheel, to be deployed “zero-shot” on the physical hardware. In layman’s terms: it worked perfectly the first time, without any of the usual real-world tinkering.

Achieving a zero-shot transfer from simulation to reality is something of a Holy Grail in robotics. It drastically slashes the time and eye-watering expense usually associated with training robots, which typically requires months of painstaking adjustments to bridge the “sim-to-real” gap. By training a sufficiently robust policy in a virtual environment, the RAI Institute has enabled Roadrunner to instinctively understand its own dynamics and apply its learned skills in the physical world the moment it’s switched on.
Why is this a game-changer?
Legged-wheeled hybrids aren’t exactly a new concept—Boston Dynamics’ own Handle robot made waves with a similar idea years ago. However, Roadrunner’s lightweight frame and advanced, unified AI control system point towards a far more practical and potentially cost-effective future. By marrying the energy efficiency of wheels on flat ground with the obstacle-clearing agility of legs, these robots hit a sweet spot for logistics and warehouse environments.
While fully humanoid robots continue their slow march toward mastering the art of walking and backflipping, Roadrunner suggests a different evolutionary path: one where agility and efficiency take precedence over mimicking the human form. The ability to master multiple modes of movement with a single AI model isn’t just a clever party trick; it’s a fundamental leap forward that could make versatile, multi-purpose robots much simpler to build and deploy in our everyday lives.