On 9 April 2026, the US Patent and Trademark Office published a Tesla, Inc. filing that caught the industry off guard. Patent US20260097493A1 isn’t your typical high-concept AI manifesto; it’s twenty pages of meticulous mechanical engineering. Naming Senior Mechanical Engineer Rod Jafari as the sole inventor, the document is dedicated entirely to a knee. There are no neural networks here, no “world models”, and no grand claims about full self-driving. Instead, we have two link members, a linear actuator, and four pivots, all arranged to ensure a humanoid can walk without breaking the bank.
The application was originally filed on 30 September 2022—the same day Tesla held its second AI Day and debuted the “Bumble-C” prototype. That night, an engineer described the robot’s knee as a “four-bar link joint” inspired by human biology. Three and a half years later, the patent record has finally caught up with the hardware. This is almost certainly the joint powering “Optimus 3,” which CEO Elon Musk teased was up and running in a late-March 2026 post on X. However, the most fascinating aspect of the patent isn’t the final spec, but the diagram that reveals the method behind the madness.
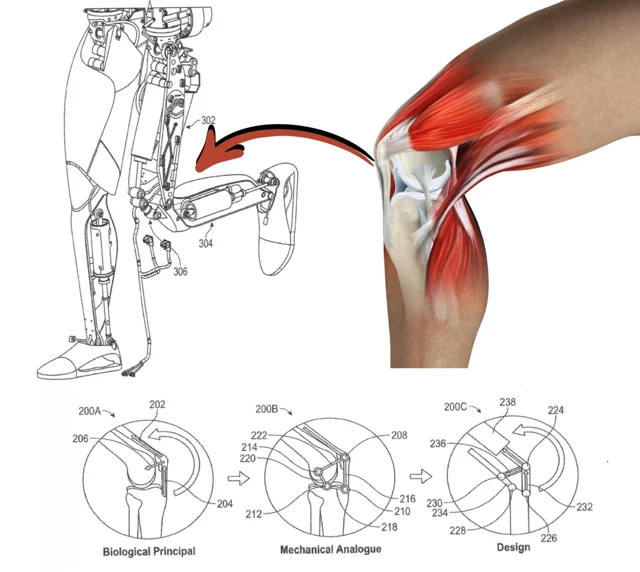
Patent FIG. 2 serves as a three-act origin story, tracing the evolution from a “Biological Principle” (the human knee), through a “Mechanical Analogue” (an abstract linkage), to the final “Design.” It is rare for a patent to be quite so transparent about its inspirations. The drawing essentially admits: the reason this thing is shaped this way is because we’ve pinched a design from nature that already works brilliantly. The mechanism—a modified inverse Hoecken’s linkage—mimics the human knee to achieve a staggering ~150° range of motion from a single, compact actuator.

The biological knee is a masterclass in efficiency. The kneecap (patella) functions as a moving pulley, shifting the leverage of the quadriceps muscle to deliver peak torque exactly when it’s needed most during a stride. Furthermore, the joint doesn’t just pivot on a fixed point; its centre of rotation actually moves, a bit of geometric wizardry managed by the cruciate ligaments which function, mechanically, as a four-bar linkage. Tesla’s patent adopts these two traits—a moving lever arm and a non-fixed pivot—to create a joint that is ruthlessly efficient. The filing notes that a modest 60-degree rotation from the actuator translates into a massive angular sweep for the lower leg.

Why does this matter?
This isn’t just clever kit; it’s the blueprint for manufacturing humanoids at scale. The entire design philosophy detailed here is about stripping away cost. A single linear actuator is cheaper, lighter, and far less fussy than a complex multi-motor joint. Its power efficiency allows for a smaller, lighter battery, further reducing the robot’s overall mass. When your stated goal is to flog Optimus for between $20,000 and $30,000, every gram and every dollar saved on a joint is a win that scales into the millions.
This is the kind of pragmatic engineering that makes Tesla’s plan to replace Model S and Model X production lines at its Fremont factory with Optimus lines seem slightly less like a fever dream. The design itself isn’t entirely unique; analysts have noted that Xpeng’s next-generation IRON humanoid, unveiled in late 2025, uses a strikingly similar modified inverted Hoecken linkage in its knee. However, with Tesla’s design having been in the public eye since its 2022 AI Day, this appears to be a classic case of convergent evolution toward an optimal solution rather than mere imitation.
Nature had millions of years to perfect this geometry. Tesla has to get there on a budget, and they need to do it fast. This patent is a rare glimpse into exactly how they plan to pull it off.